
For years doctors and engineers, have been working to create a replacement for limbs. Whether its been through mechanical levers or high functioning brain computer interface systems, recreating a human limb has put our minds to a test of physiological systems modelling and understanding. Lets look at a prosthetic hand design and how physiology challenges the engineering design process.
Relevant Physiology Background
Any muscle movement is caused simply with the movement of an electric potential that travels across the neurons in our body. This signal then triggers a chemical change in the small muscle fibers which join together to make a motor unit. Multiple motor units work together to make a muscle. Multiple muscles then work together to create movements as we desire.
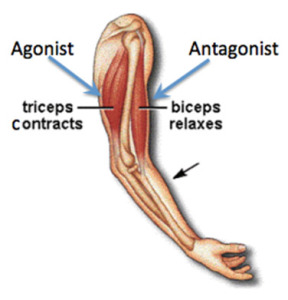
Zooming into the anatomy of a hand we can identify extensors, flexors, adductors, abductors and more support muscles. Additionally, we have tendons and ligaments that enjoin the muscles to make a stable system that creates movements in 3 dimensions. An important point to note here is that muscles work in pairs; while one contracts, the other relaxes. See in the image below how two muscles are antagonists for one movement. This is important to note as it can help us in identifying our movement units and use one signal to control two units at the same time (one motor can extend and the other can contract/ flex based on one signal received from the body)
Design
Generally, the system of a prosthetic hand has multiple components to it. We can break the design down into 3 parts.

These are the three basic steps to a working prosthetic. There are many approaches out there, but I will demonstrate the one that I have used.
Sensor
Sense the signal using a muscle sensor. These sensors pick up the neuro – muscular signals from the surface of the body. For a typical initiated contraction, the image below shows what the signal looks like. As you can see, the amplitude of the signal increases with movement. Now, this is exactly what is used for EMG controlled prosthetic hands. The fact that a physiological change is measurable is the first step to being able to record it and further use it.

Processing
Although the processing is quiet extensive and requires considering many aspects of software, I am going to try and give a brief explanation of an algorithm.
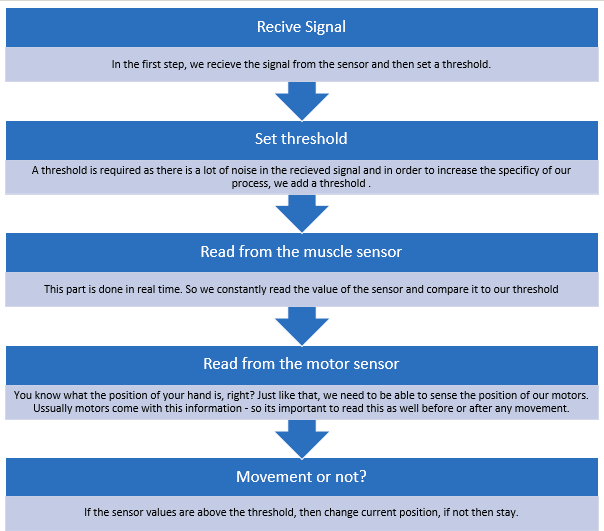
Movement
This is a video of my prototype moving with the algorithm described above. In this video, I only connected one motor hence the reason why only the 5th digit moves upon the generation of a movement.
As one can infer, this was a great example of extracting information from physiology of a hand to generate a functional device. This was the simplest form of prosthetic control that I could demonstrate within the limitations of this post. Of course there are so many things that can be added on to this design depending on your design requirements and physiological requirements. Moreover, I believe that through a deeper knowledge of the individual muscles of the hands and the movements they generate, one can create a more fine tuned device where a multiple channels of signals can be used to generate a multiple movements. These devices, if made better, can help people regain their limbs and hopefully achieve at least somewhat of the functionality that they have lost.
